We introduced FederNet, an autonomous navigation system for lunar and planetary missions, which proved effective in meeting planetary positioning requirements with an accuracy below 400 meters. Its key advantage is independence from Earth-based operators, reducing operational costs.
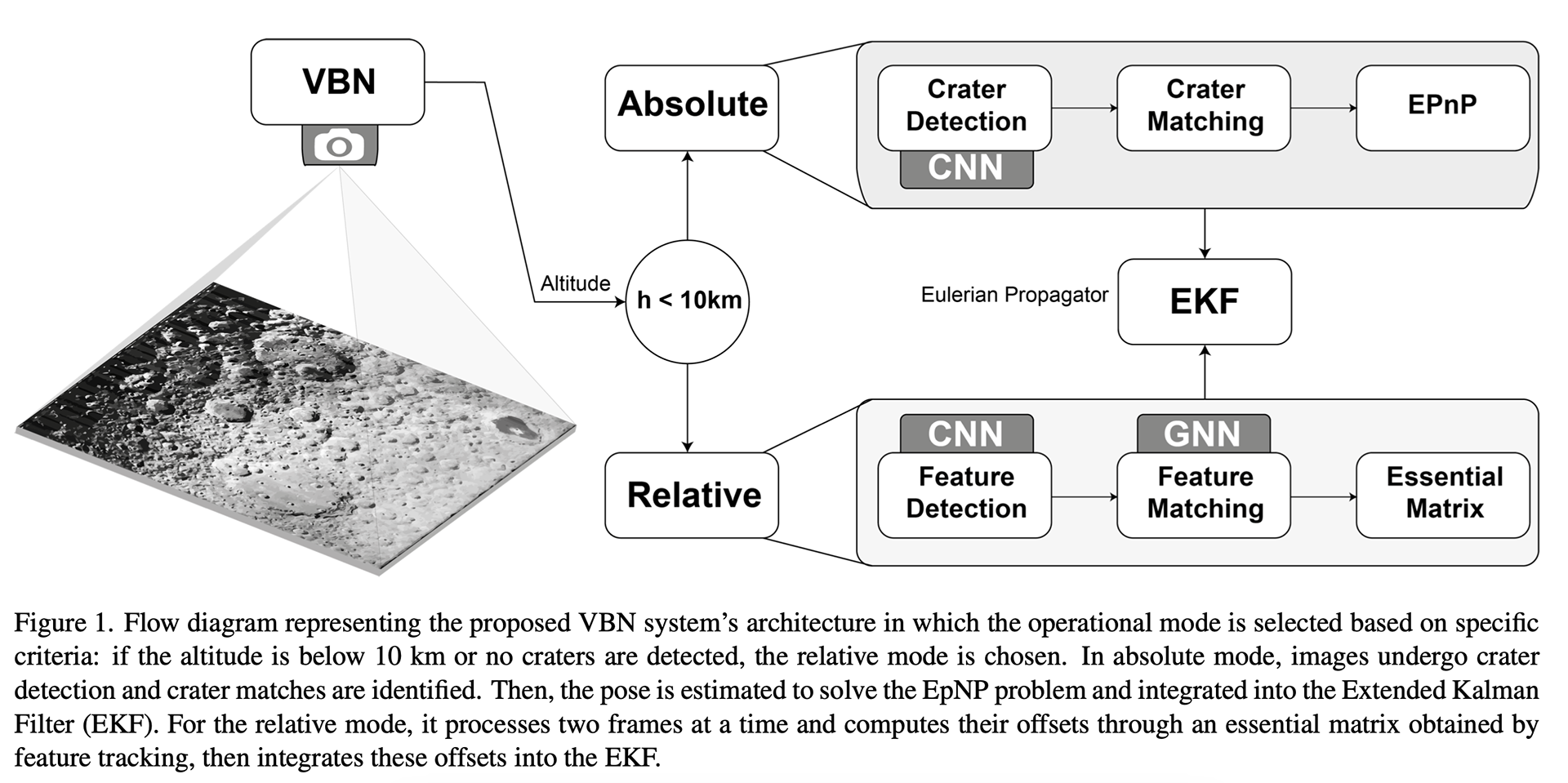
To enhance onboard deployment, FederNet v2 was developed (Figure 1), featuring a dual-mode approach that switches between “absolute” and “relative” modes based on altitude and crater visibility. This innovative, adaptive VBN system was validated through simulations, achieving high precision with a horizontal displacement error of 27.4 m and a vertical error of 0.8 m. The crater detection module operates efficiently, with inference times under one second and an overall AP of 0.67.
Credits: University of Naples Federico II, Telespazio (2024)
FederNet V2 System Architecture
[1]: Del Prete, R., Renga, A. A Novel Visual-Based Terrain Relative Navigation System for Planetary Applications Based on Mask R-CNN and Projective Invariants. Aerotec. Missili Spaz. 101, 335–349 (2022). https://doi.org/10.1007/s42496-022-00139-0
[2]: Luca Ostrogovich, Roberto Del Prete, Giuseppe Tomasicchio, Nicolas Longepe, Alfredo Renga; Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2024, pp. 6799-6808